TORQU·E
What?
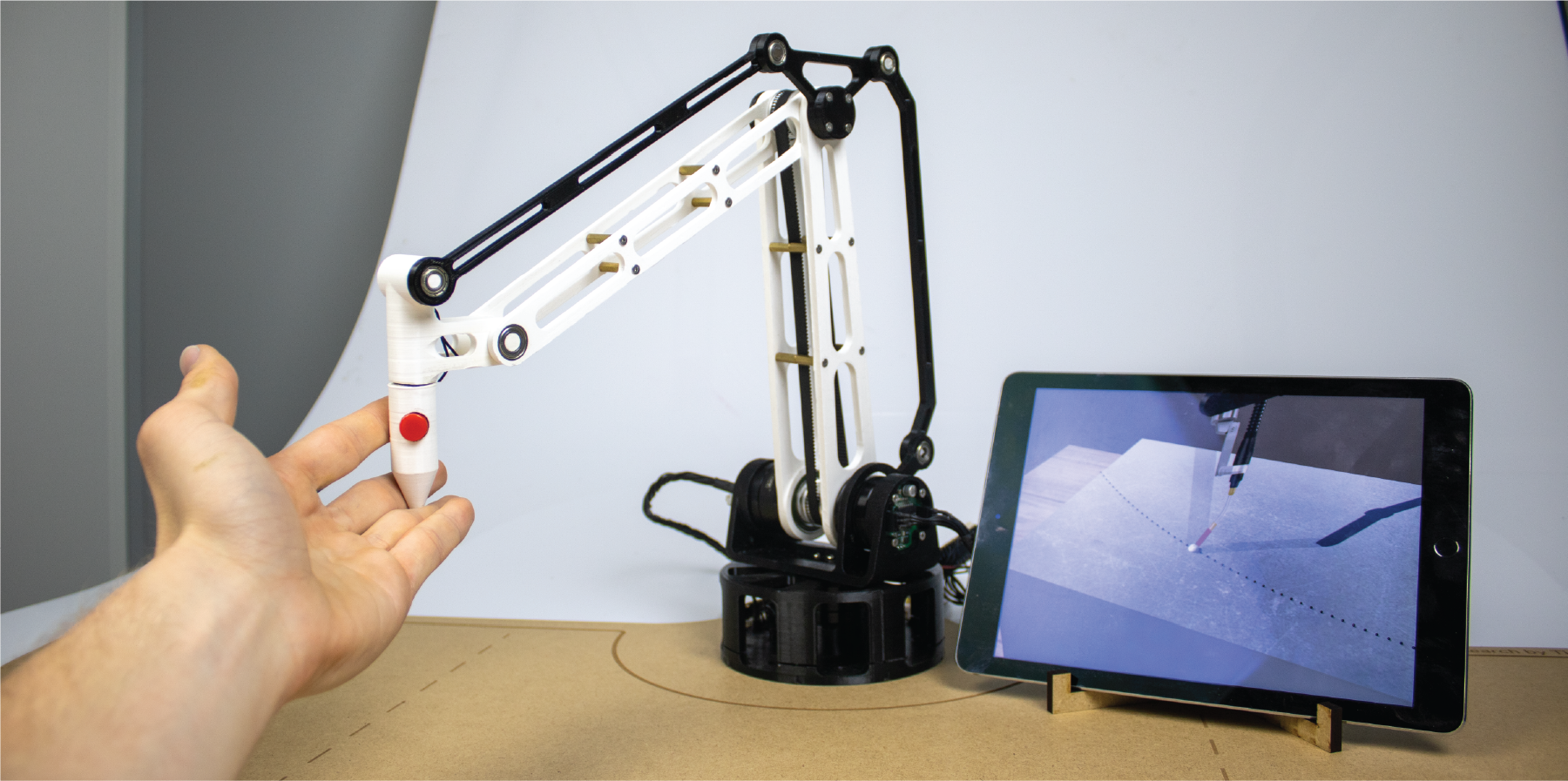
In this research project, I delved into the transformative potential of force-feedback in control interfaces for remote arc-welding robots. This research explores how different levels of force-feedback—submissive, assistive, and dominant—affect task performance and user experience in contexts as trajectory adherence and situation awareness. By providing intuitive and responsive feedback, TORQUE aims to enhance precision and spatial understanding, paving the way for more efficient and user-friendly robotic control systems. Discover how innovative haptic technology can revolutionize remote human-robot interactions.
What did I contribute?
Brainstorming and ideation
Rapid prototyping
Programming microcontrollers
Developing a virtual environment in Unity
User studies
Developed skills
More advanced rapid prototyping skills, which 3D printing in particular
The ability to shape and conduct a robust design research project
What were my main takeaways?
Working with robotics was a thrilling experience, and I see this as a fruitful pathway into my professional career.
The world of automation and user-friendly interfaces is a field that I would like to delve into further.